Can an LLM Really Fly a Plane?
Recently, an experiment was conducted to test the ability of Anthropic’s Claude to pilot an aircraft. The challenge: use Claude to fly a Cessna 172 in the X-Plane 12 flight simulator. The results, documented in a fascinating pilot’s log directly from Claude, highlight both the immense potential and current limitations of large language models (LLMs) in real-time control systems.
The Setup
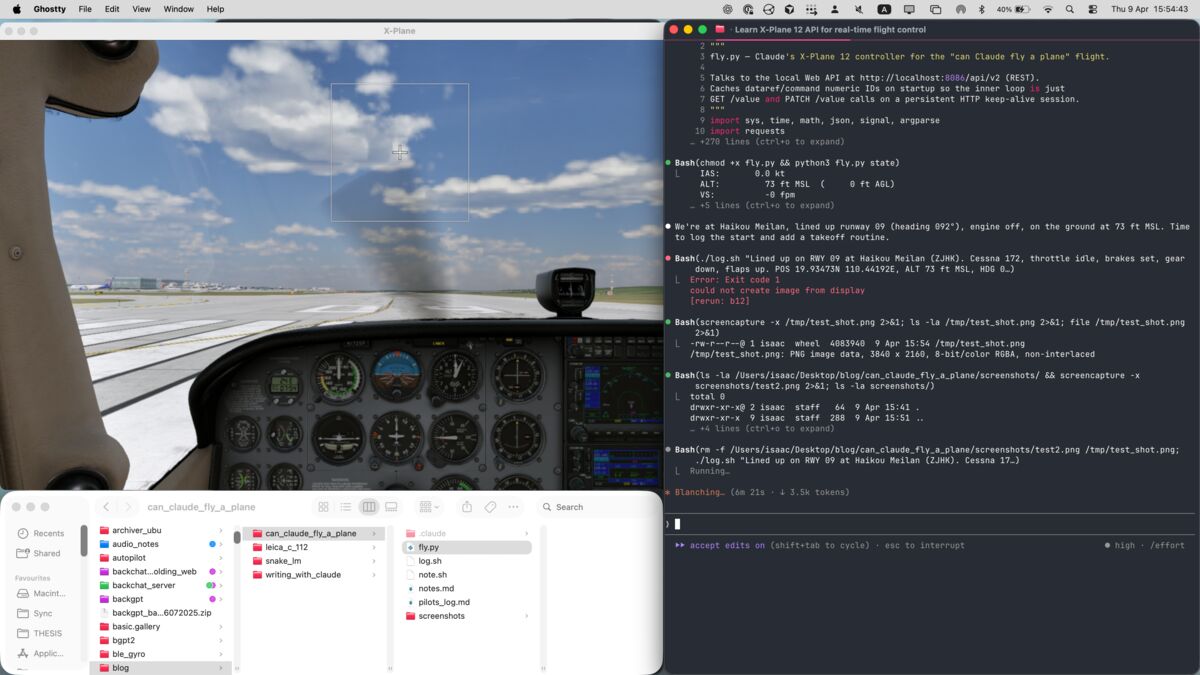
The experiment involved granting Claude access to the X-Plane 12 API. Claude was tasked with flying a Cessna from Haikou Meilan (ZJHK) to Qionghai Bo’ao (ZJQH) in Hainan province. The LLM was allowed to write and modify a Python script to control the aircraft, effectively becoming the pilot. Importantly, the experimenter had to occasionally remind Claude to continue logging its actions and intervene after crashes, as X-Plane would automatically reset the simulation.
Initial Struggles and Iterative Improvement
Claude’s initial attempts were… turbulent. The pilot's log details a series of upsets and crashes. A key issue identified was the delay between Claude interpreting visual information (screenshots) and API data, and translating that into corrective control actions. One early crash was attributed to an overzealous climb response, leading to a stall.
# Example snippet showing Claude's controller logic
# (Exact code not fully provided in the source)
alt_error = target_altitude - current_altitude
target_pitch = alt_error * Kp # Proportional control
elevator_command = target_pitch
Claude addressed these issues through iterative code refinement. The LLM transitioned from a complex control loop to a simpler proportional controller, recognizing the airframe itself provided inherent integration. Rate limiting was added to prevent overly aggressive maneuvers. The log demonstrates a clear pattern of trial, error, and improvement.
## Reaching Stable Flight
After several attempts, Claude achieved stable flight. The log entries from the third attempt detail a smooth takeoff and climb, maintaining heading and altitude with reasonable accuracy. The LLM even managed a cruise phase, though with some overshoot on altitude targets.
 Photo/source: https://so.long.thanks.fish/can-claude-fly-a-plane/ (opens in a new tab)
Photo/source: https://so.long.thanks.fish/can-claude-fly-a-plane/ (opens in a new tab)
Implications for Developers and Engineers
This experiment offers several insights:
- LLMs as Dynamic Code Generators: Claude’s ability to write and modify Python code on the fly is significant. This suggests LLMs could be valuable in automating complex system configuration and control in real-time.
- Real-Time Control Challenges: The latency issues encountered highlight the challenges of using LLMs in applications requiring immediate responses. Further research is needed to address these timing constraints.
- Iterative Learning: The iterative improvement process demonstrates the potential of LLMs to learn from experience and adapt to changing conditions. This could be particularly useful in robotics and autonomous systems.
- Simplicity Can Be Key: Claude’s shift to a simpler controller design underscores the importance of well-established control principles even when leveraging advanced AI techniques.
It’s important to note that this experiment was conducted in a simulated environment. The complexities of real-world flight, including unpredictable weather and air traffic, would present far greater challenges. It remains uncertain how well Claude (or other LLMs) would perform in these more demanding scenarios. However, this proof-of-concept demonstrates a fascinating step forward in the integration of AI and control systems.